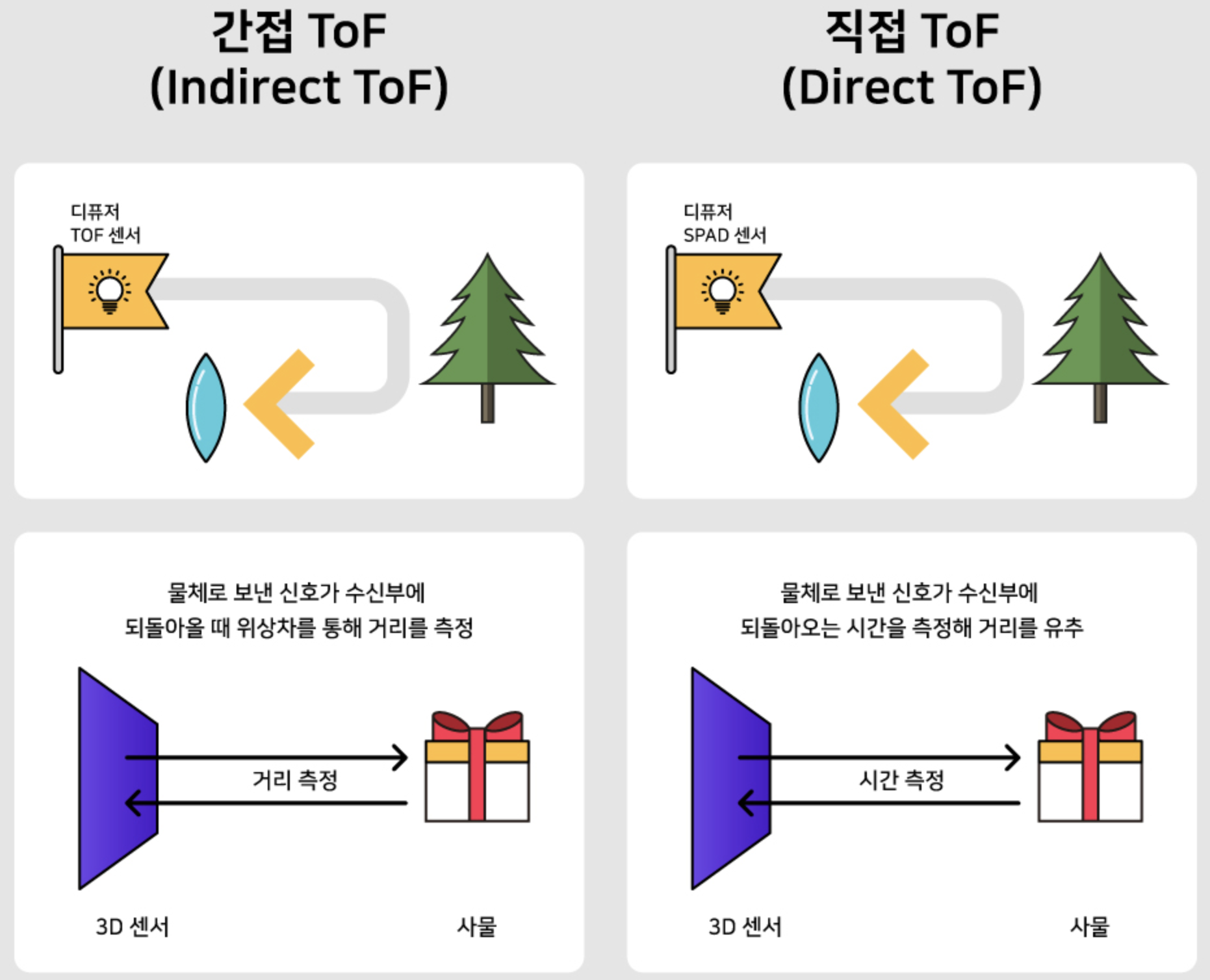
3D 이미지센서가 3D 이미지를 얻는 방식은 크게 양안 시각(Stereo Vision)4) 방식, 구조 광(Structured Light)5) 방식, 비행시간(Time of Flight, 이하 ToF) 방식으로 분류된다. 이중 ToF 방식은 거리 측정 방식에 따라 위상 차이를 이용하는 ‘간접 ToF(Indirect ToF, 이하 I-ToF)’와 시간 차이를 직접 측정하는 방식인 ‘직접 ToF(Direct ToF, 이하 D-ToF)’로 구분된다.
출처:https://news.skhynix.co.kr/2450
[미래 반도체 기술] 차세대 3D 이미지센서 소자 - 단광자눈사태다이오드(SPAD)
2021.05.12|by 장준연 이미지센서는 빛을 디지털 신호로 변환해 이미지로 구현하는 역할을 하는 반도체다. 오늘날 카메라의 비중이 높은 스마트폰에서 빼놓을 수 없는 기술이자, 자
news.skhynix.co.kr
초창기 애플 아이폰 X의 전면부 카메라에 사용된 3D 이미지센서에는 구조 광 방식이 활용됐으나, 이후 I-ToF 방식의 초소형 이미지센서가 개발돼 다양한 스마트폰에 적용되고 있다. 지난해 애플은 스마트폰 업체 중 가장 먼저 아이패드 프로와 아이폰 12 프로 후면부에 D-ToF 센서를 탑재했다. 애플은 이를 개발하기 위해 소니의 SPAD 소자·공정 기술을 사용했고, 기존 I-ToF 센서와의 차별점을 강조하기 위해 이를 D-ToF가 아닌 ‘LiDAR(Light Detection and Ranging) Scanner’라고 명명했다. 애플의 LiDAR Scanner는 5미터의 측정 거리를 제공하며 I-ToF 센서보다 우수한 성능을 자랑한다. 애플은 이 같은 강점을 활용, 아이폰 12 출시 당시 3D 이미지를 활용한 다양한 증강현실(Augmented Reality, AR) 기반 앱과 기능을 전면에 내세웠다.
'1. SW개발 & IT트렌드' 카테고리의 다른 글
| TOFU for Raspberry Pi Compute Module 4 (0) | 2021.08.13 |
|---|---|
| [기사] “개발자들, 러스트·스벨트 선호하지만 앵귤러JS는 그닥” (0) | 2021.08.10 |
| The MagPi — Issue 108 : Raspberry Pi (0) | 2021.08.01 |
| Raspberry Pi makes your retro analogue camera digital (0) | 2021.07.31 |
| DeskPi Pro Set-top Box For Raspberry Pi 4 (0) | 2021.07.27 |




댓글